/* ===========Interfacing code for the GY-88 ===============
Code from multiple sources including Bildr.org, Jim Lindblom,
Jordan McConnell, SparkFun Electronics, and John Chi
Program exposes most data from the GY-88
Not shown, By adding SPI and SD header files, data can be printed to disk
instead of monitor by using command "myfile.print()" for rocket altimeter
or for RF telemetry.
=================================================== */
#include <Wire.h>
#define BMP085_ADDRESS 0x77 // I2C address of BMP085 baraometer
#define MAG_ADDRESS 0x1E // I2C address of HMC5883 magnetometer
//alternate code representation below
const int MPU=0x68; // I2C address of the MPU-6050 gyroscope
//========= barometer variables ============
float inhg; //inches of mercury, barometer
const unsigned char OSS = 0; // Oversampling Setting
// Calibration values
int ac1,ac2,ac3,b1,b2,mb,mc,md,b5;
unsigned int ac4,ac5,ac6;
// b5 is calculated in bmp085GetTemperature(...), this variable
//is also used in bmp085GetPressure(...)
// so ...Temperature(...) must be called before ...Pressure(...).
//====== MPU-6050 variables======
int AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
//=======Magnetometer variables=========
int x,y,z; //triple axis data
//void bmp085Calibration(); //prototype for debugging (don't ask)
void setup(){
Serial.begin(9600);
Wire.begin();
bmp085Calibration();
}
void loop()
{//============= Barometer/Altimeter ============
float temperature = bmp085GetTemperature(bmp085ReadUT()); //MUST be called first
float pressure = bmp085GetPressure(bmp085ReadUP());
float atm = pressure / 101325; // "standard atmosphere"
float altitude = calcAltitude(pressure); //Uncompensated caculation - in Meters
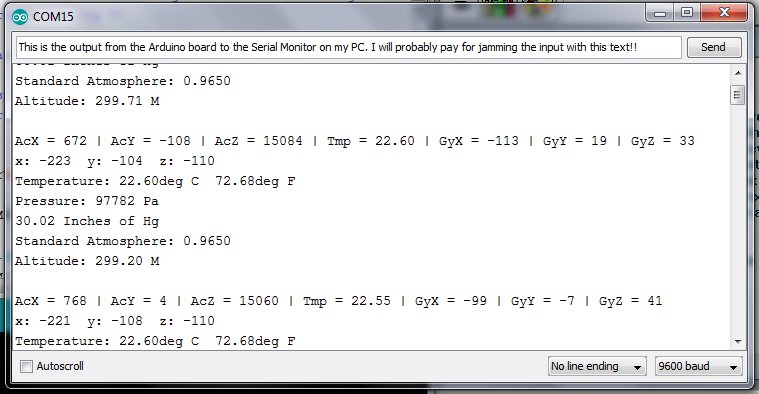
Serial.print("Temperature: ");
Serial.print(temperature, 2); //display 2 decimal places
Serial.print("deg C ");
Serial.print(((temperature*9.0/5.0)+32.0), 2); //display 2 decimal places
Serial.println("deg F");
Serial.print("Pressure: ");
Serial.print(pressure, 0); //whole number only.
Serial.println(" Pa");
inhg=(float)pressure*0.0002953+1.14;//1.14 is fudge factor for local compensation
Serial.print(inhg, 2); //whole number only.
Serial.println(" Inches of Hg");
Serial.print("Standard Atmosphere: ");
Serial.println(atm, 4); //display 4 decimal places
Serial.print("Altitude: ");
Serial.print(altitude, 2); //display 2 decimal places
Serial.println(" M");
Serial.println();//line break
//============= Gyro and Accelerometer ============
//initialization of module
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
//data collection
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,14,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
Serial.print("AcX = "); Serial.print(AcX);
Serial.print(" | AcY = "); Serial.print(AcY);
Serial.print(" | AcZ = "); Serial.print(AcZ);
//equation for temperature in degrees C from datasheet
Serial.print(" | Tmp = "); Serial.print(Tmp/340.00+36.53);
Serial.print(" | GyX = "); Serial.print(GyX);
Serial.print(" | GyY = "); Serial.print(GyY);
Serial.print(" | GyZ = "); Serial.println(GyZ);
Wire.endTransmission();
// ================= magnetometer ================
//initialization
Wire.begin();//Put the HMC5883 IC into the correct operating mode
Wire.beginTransmission(MAG_ADDRESS); //open communication with HMC5883
Wire.write(0x02); //select mode register
Wire.write(0x00); //continuous measurement mode
Wire.endTransmission();
Wire.beginTransmission(MAG_ADDRESS);
Wire.write(0x03); //select register 3, X MSB register
Wire.endTransmission();
//Data collection from each axis, 2 registers per axis
Wire.requestFrom(MAG_ADDRESS, 6);
if(6<=Wire.available()){
x = Wire.read()<<8; //X msb
x |= Wire.read(); //X lsb
z = Wire.read()<<8; //Z msb
z |= Wire.read(); //Z lsb
y = Wire.read()<<8; //Y msb
y |= Wire.read(); //Y lsb
}
Wire.endTransmission();
//Print out values of each axis
Serial.print("x: ");
Serial.print(x);
Serial.print(" y: ");
Serial.print(y);
Serial.print(" z: ");
Serial.println(z);
delay(500);
}
// ====================== End of Program ================
// ============== begin altimeter subroutines =============
// Stores all of the bmp085's calibration values into global variables
// Calibration values are required to calculate temp and pressure
// This function should be called at the beginning of the program
void bmp085Calibration()
{ ac1 = bmp085ReadInt(0xAA);
ac2 = bmp085ReadInt(0xAC);
ac3 = bmp085ReadInt(0xAE);
ac4 = bmp085ReadInt(0xB0);
ac5 = bmp085ReadInt(0xB2);
ac6 = bmp085ReadInt(0xB4);
b1 = bmp085ReadInt(0xB6);
b2 = bmp085ReadInt(0xB8);
mb = bmp085ReadInt(0xBA);
mc = bmp085ReadInt(0xBC);
md = bmp085ReadInt(0xBE);
}
// Calculate temperature in deg C
float bmp085GetTemperature(unsigned int ut){
long x1, x2;
x1 = (((long)ut - (long)ac6)*(long)ac5) >> 15;
x2 = ((long)mc << 11)/(x1 + md);
b5 = x1 + x2;
float temp = ((b5 + 8)>>4);
temp = temp /10;
return temp;
}
// Calculate pressure given up
// calibration values must be known
// b5 is also required so bmp085GetTemperature(...) must be called first.
// Value returned will be pressure in units of Pa.
long bmp085GetPressure(unsigned long up){
long x1, x2, x3, b3, b6, p;
unsigned long b4, b7;
b6 = b5 - 4000;
// Calculate B3
x1 = (b2 * (b6 * b6)>>12)>>11;
x2 = (ac2 * b6)>>11;
x3 = x1 + x2;
b3 = (((((long)ac1)*4 + x3)<<OSS) + 2)>>2;
// Calculate B4
x1 = (ac3 * b6)>>13;
x2 = (b1 * ((b6 * b6)>>12))>>16;
x3 = ((x1 + x2) + 2)>>2;
b4 = (ac4 * (unsigned long)(x3 + 32768))>>15;
b7 = ((unsigned long)(up - b3) * (50000>>OSS));
if (b7 < 0x80000000)
p = (b7<<1)/b4;
else
p = (b7/b4)<<1;
x1 = (p>>8) * (p>>8);
x1 = (x1 * 3038)>>16;
x2 = (-7357 * p)>>16;
p += (x1 + x2 + 3791)>>4;
long temp = p;
return temp;
}
// Read 1 byte from the BMP085 at 'address'
char bmp085Read(unsigned char address)
{ unsigned char data;
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(address);
Wire.endTransmission();
Wire.requestFrom(BMP085_ADDRESS, 1);
while(!Wire.available());
return Wire.read();
}
// Read 2 bytes from the BMP085
// First byte will be from 'address'
// Second byte will be from 'address'+1
int bmp085ReadInt(unsigned char address)
{ unsigned char msb, lsb;
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(address);
Wire.endTransmission();
Wire.requestFrom(BMP085_ADDRESS, 2);
while(Wire.available()<2) ;
msb = Wire.read();
lsb = Wire.read();
return (int) msb<<8 | lsb;
}
// Read the uncompensated temperature value
unsigned int bmp085ReadUT(){
unsigned int ut;
// Write 0x2E into Register 0xF4
// This requests a temperature reading
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(0xF4);
Wire.write(0x2E);
Wire.endTransmission();
// Wait at least 4.5ms
delay(5);
// Read two bytes from registers 0xF6 and 0xF7
ut = bmp085ReadInt(0xF6);
return ut;
}
// Read the uncompensated pressure value
unsigned long bmp085ReadUP(){
unsigned char msb, lsb, xlsb;
unsigned long up = 0;
// Write 0x34+(OSS<<6) into register 0xF4
// Request a pressure reading w/ oversampling setting
Wire.beginTransmission(BMP085_ADDRESS);
Wire.write(0xF4);
Wire.write(0x34 + (OSS<<6));
Wire.endTransmission();
// Wait for conversion, delay time dependent on OSS
delay(2 + (3<<OSS));
// Read register 0xF6 (MSB), 0xF7 (LSB), and 0xF8 (XLSB)
msb = bmp085Read(0xF6);
lsb = bmp085Read(0xF7);
xlsb = bmp085Read(0xF8);
up = (((unsigned long) msb << 16) |
((unsigned long) lsb << 8) |
(unsigned long) xlsb) >> (8-OSS);
return up;
}
void writeRegister(int deviceAddress, byte address, byte val) {
Wire.beginTransmission(deviceAddress); // start transmission to device
Wire.write(address); // send register address
Wire.write(val); // send value to write
Wire.endTransmission(); // end transmission
}
int readRegister(int deviceAddress, byte address){
int v;
Wire.beginTransmission(deviceAddress);
Wire.write(address); // register to read
Wire.endTransmission();
Wire.requestFrom(deviceAddress, 1); // read a byte
while(!Wire.available()) {
// waiting
}
v = Wire.read();
return v;
}
float calcAltitude(float pressure){
float A = pressure/101325;
float B = 1/5.25588;
float C = pow(A,B);
C = 1 - C;
C = C /0.0000225577;
return C;
}
|
!!